테슬라 소프트웨어 2023.27.12 Bug Fixes
A PHP Error was encountered
Severity: Warning
Message: file_exists(): Unable to find the wrapper ".https" - did you forget to enable it when you configured PHP?
Filename: views/software_update_detail.php
Line Number: 74
Backtrace:
File: /volume1/web/application/views/software_update_detail.php
Line: 74
Function: file_exists
File: /volume1/web/application/controllers/Main.php
Line: 855
Function: view
File: /volume1/web/application/controllers/Main.php
Line: 12
Function: software_update_detail
File: /volume1/web/index.php
Line: 315
Function: require_once

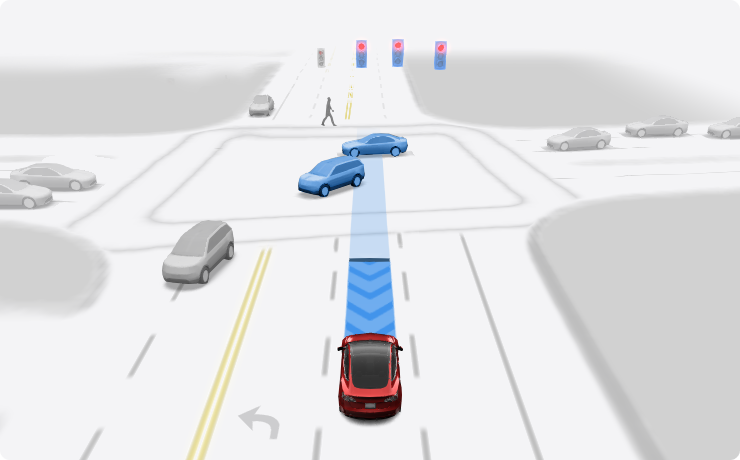
단일 당겨서 자동 조종 장치 시작
오른쪽 레버를 두 번이 아닌 한 번 아래로 당길 때 오토파일럿이 시작되도록 설정할 수 있습니다. 이 설정을 선택하려면 컨트롤 > 자동 조종 장치 > 자동 조종 장치 활성화 > 단일 당기기로 이동합니다.
Single Pull을 사용하는 경우 Autopilot 기능이 Autosteer(베타)로 설정된 경우 Traffic-Aware Cruise Control을 우회하게 됩니다. 마찬가지로 오토파일럿 기능이 완전 자율 주행(베타)으로 설정된 경우 오토스티어(베타) 및 교통 인식 크루즈 컨트롤을 우회합니다.
싱글 풀(Single Pull)을 사용하면 오토스티어(베타) 또는 완전 자율 주행(베타)을 취소할 때 스티어링을 맡거나 레버를 한 번 밀어 올리면 즉시 수동 운전으로 돌아갑니다.
모든 오토파일럿 기능과 마찬가지로 계속해서 주의를 기울여야 하며 기능을 취소하고 수동 운전으로 돌아가는 등 즉각적인 조치를 취할 준비가 되어 있어야 합니다.
A PHP Error was encountered
Severity: Warning
Message: file_exists(): Unable to find the wrapper ".https" - did you forget to enable it when you configured PHP?
Filename: views/software_update_detail.php
Line Number: 74
Backtrace:
File: /volume1/web/application/views/software_update_detail.php
Line: 74
Function: file_exists
File: /volume1/web/application/controllers/Main.php
Line: 855
Function: view
File: /volume1/web/application/controllers/Main.php
Line: 12
Function: software_update_detail
File: /volume1/web/index.php
Line: 315
Function: require_once
FSD 베타 11.4.8.1
-활성화 및 해제를 단순화하는 데 도움이 되도록 두 개가 아닌 단일 줄기를 눌러 자동 조종 장치를 활성화하는 옵션이 추가되었습니다.
- 차량 감지, 의미 체계, 속도 및 속성 네트워크에 새로운 효율적인 비디오 모듈을 도입하여 낮은 대기 시간으로 성능을 향상시켰습니다. 이는 중간 계산을 캐시하여 데이터 양을 극적으로 줄이는 다층 계층적 비디오 모듈을 생성하여 달성되었습니다. 특정 시간에 발생하는 컴퓨팅.
- 더 나은 자동 라벨링으로 기존 데이터 세트를 새로 고치고 새로운 비디오 모듈을 도입하여 멀리 있는 교차 물체 감지를 6% 추가로 개선하고 차량 감지의 정밀도를 향상했습니다.
- 추가 데이터와 성능 및 대기 시간을 개선하는 비디오 아키텍처 변경을 통해 끼어드는 차량 감지의 정밀도가 15% 향상되었습니다.
-자동 라벨이 지정된 데이터 세트를 개선하고, 새로운 비디오 모듈을 도입하고, 모델 훈련과 추론을 더욱 긴밀하게 조정하여 차량 속도 오류를 3% 줄이고 차량 가속 오류를 10% 줄였습니다.
- 성능 저하 없이 새로운 비디오 모듈 아키텍처를 사용하여 차량 시맨틱 네트워크의 대기 시간을 15% 줄였습니다.
-자동 레이블이 지정된 데이터 세트에서 보행자 및 자전거 트랙을 공동으로 최적화할 때 객체 운동학을 보다 광범위하게 활용하여 보행자 및 자전거 회전 오류를 8% 이상 줄였습니다.
- 10배 더 많은 HW4 데이터를 활용하고 해상도를 3배로 늘리며 측정의 전반적인 안정성을 높여 Vision Park Assist 예측의 기하학적 정확도를 16% 향상했습니다.
-정적 물체 감지 네트워크 업데이트로 인해 경로 막힘 차선 변경 정확도가 10% 향상되었습니다.
업데이트 리스트